
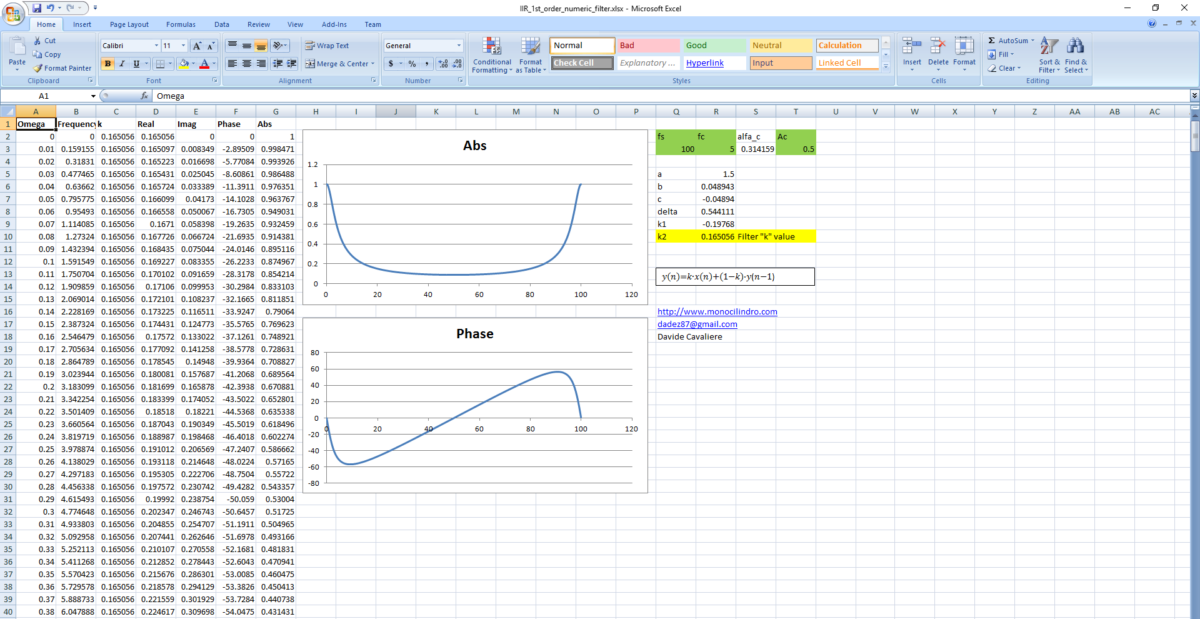
Recently, for my IMU (Inertial Measurement Unit) project, I had the necessity to add low-pass filter, in order to reduce the noise on the accelerometer sensor signal. For this purpose, I decided to use a 1st order IIR (Infinite Impulse Response) filter, because it is easy to implement and run on a microcontroller. In general, … Continue reading "How to calculate a first order IIR filter in 5 minutes"
Tag: IMU
Library for Arduino and MPU-6050 communication
As you probably already know from my project "Fuelino", I have been using a cheap and easy-to-use IMU (Inertial Measurement Unit) called MPU-6050. This board mounts a cheap integrated circuit capable of acquiring acceleration and gyroscope (and temperature) signals with 16 bits resolution. Such raw data can be read from the main microcontroller unit (for … Continue reading "Library for Arduino and MPU-6050 communication"
How to install GLFW library on Visual Studio C++ 2015
When you work as an engineer, it always comes the time when you need to perform some signal processing and visualize your data on a 3D, in real-time. This happened to me once I started playing with IMU (Inertial Measurement Unit): I acquired acceleration and gyroscope data from the sensor, and used my PC to … Continue reading "How to install GLFW library on Visual Studio C++ 2015"
How to implement an IMU using MPU-6050 and Fuelino Proto3
This guide shows how I implemented an IMU (Inertial Measurement Unit) using Fuelino Proto3 (equipped with Arduino Nano) and an MPU-6050 accelerometer and gyroscope module. I will use this library to calculate the motorcycle leaning angles (Tait-Bryan angles: roll pitch yaw) based on the raw sensors data logged on the Micro SD card. Fuelino Proto3 … Continue reading "How to implement an IMU using MPU-6050 and Fuelino Proto3"
Fuelino Proto3 and Race Render 3 video overlay
Today, I took an other video on my Honda CBR125R, and tried to do some data overlay using RaceRender 3.5.5 Free. The data has been acquired using Fuelino Proto3, the open source fuel injection module and data logger for motorcycle. The signals visualized in the video below are: Engine speed (rpm) Throttle Position Sensor signal … Continue reading "Fuelino Proto3 and Race Render 3 video overlay"