
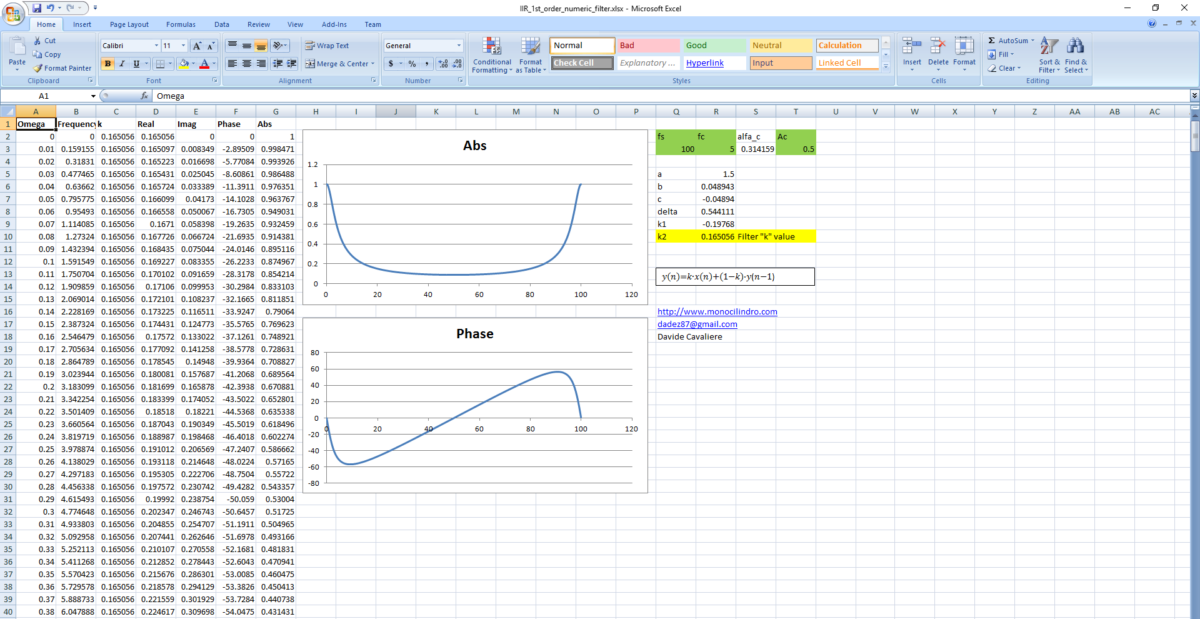
Recently, for my IMU (Inertial Measurement Unit) project, I had the necessity to add low-pass filter, in order to reduce the noise on the accelerometer sensor signal. For this purpose, I decided to use a 1st order IIR (Infinite Impulse Response) filter, because it is easy to implement and run on a microcontroller. In general, … Continue reading "How to calculate a first order IIR filter in 5 minutes"
Tag: filter
Calculating Tait Bryan angles by acceleration and gyroscope sensors signal fusion
This article has the purpose of showing how it is possible to calculate Tait Bryan angles (yaw, pitch, roll) by fusing the data coming from multiple sensors (3-axis acceleration sensor and 3-axis gyroscope sensor). First of all, let's see which axis are used to evaluate the rotation angles. Please notice that axis and angles sign … Continue reading "Calculating Tait Bryan angles by acceleration and gyroscope sensors signal fusion"