
When you work as an engineer, it always comes the time when you need to perform some signal processing and visualize your data on a 3D, in real-time. This happened to me once I started playing with IMU (Inertial Measurement Unit): I acquired acceleration and gyroscope data from the sensor, and used my PC to compute the Tait-Bryan angles. However, I wanted somehow to show the 3D orientation, in real time, using some tool. There is a nice programming language called Processing, which allows to do that, but it does not have all the "power" of C++.
Therefore, after searching a bit on Google, I found a nice library called GLFW, which uses OpenGL and, most important, is free. However, using it on Visual Studio C++ 2015 is not straight-forward, so I decided to prepare a simple guide, in PDF (GLFW_install_guide) which explains how to configure Visual Studio (less than 5 minutes required) in order to be ready to work for your project.
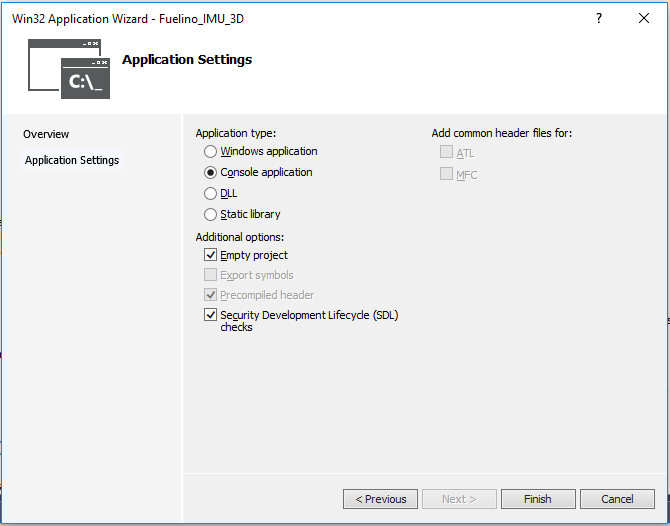
I will summarize here below the main steps. First, create a new project "Win32 Console Application".
 Select "Empty project".
Select "Empty project".
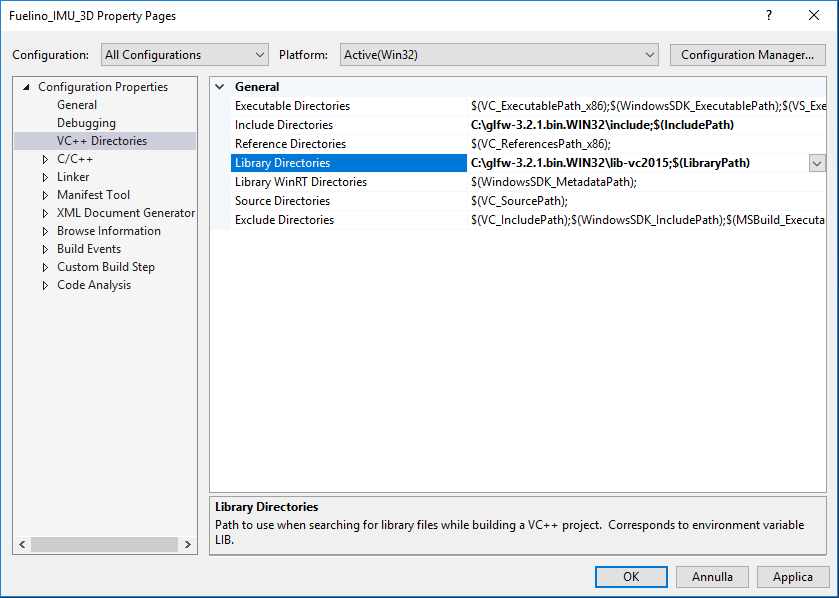
 Right click on project name and Properties, and modify include and library directories.
Right click on project name and Properties, and modify include and library directories.
 Add Additional Dependencies on Linker -> Input.
Add Additional Dependencies on Linker -> Input.
 Build the project and run it. Don't forget to include "GLFW/glfw3.h".
Build the project and run it. Don't forget to include "GLFW/glfw3.h".
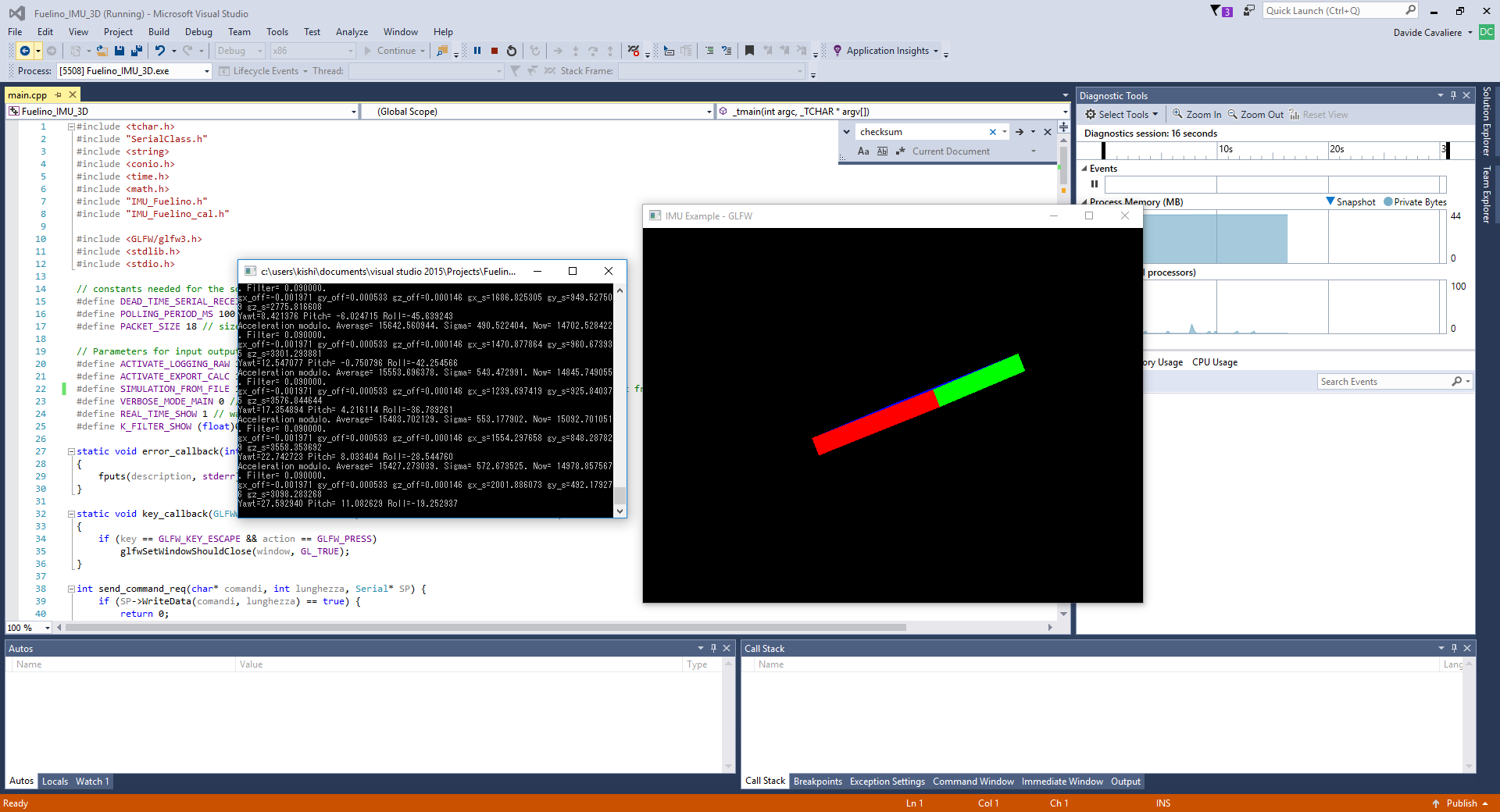 In case you want to test if everything works fine on your PC, all you have to do is to, at first, install Visual Studio C++ on your PC, then download the GLFW libraries and extract them in your C:\ folder. The source code of the program shown above is available here: Fuelino_IMU_3D_20170215m. Just build it and run. It will load the sensors raw data inside "input.log", calculate Tait-Bryan angles (yaw, pitch, roll) and show them in real-time on the 3D window.
In case you want to test if everything works fine on your PC, all you have to do is to, at first, install Visual Studio C++ on your PC, then download the GLFW libraries and extract them in your C:\ folder. The source code of the program shown above is available here: Fuelino_IMU_3D_20170215m. Just build it and run. It will load the sensors raw data inside "input.log", calculate Tait-Bryan angles (yaw, pitch, roll) and show them in real-time on the 3D window.